Product Description
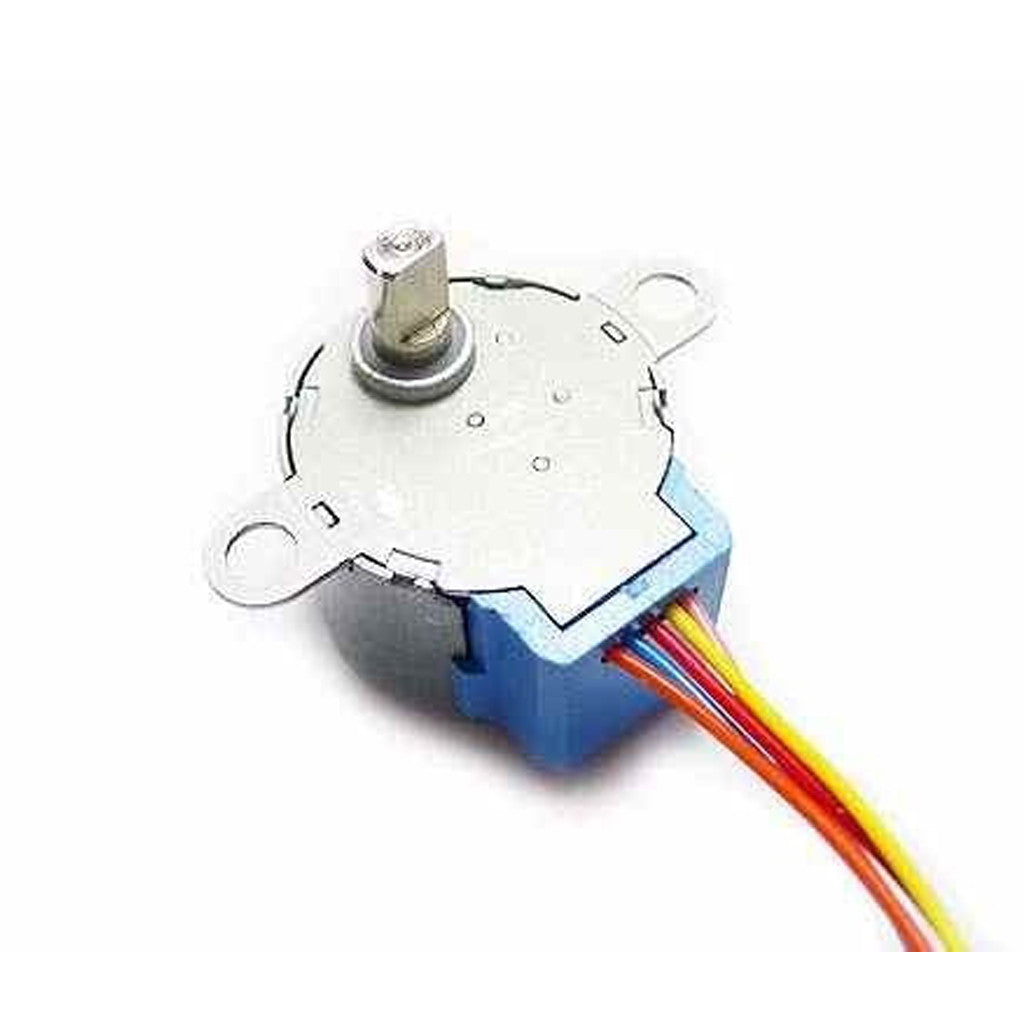
A stepper motor is an electromechanical device which converts electrical pulses into discrete mechanical movements. The shaft or spindle of a stepper motor rotates in discrete step increments when electrical command pulses are applied to it in the proper sequence.
The motors rotation has several direct relationships to these applied input pulses. The sequence of the applied pulses is directly related to the direction of motor shafts rotation. The speed of the motor shafts rotation is directly related to the frequency of the input pulses and the length of rotation is directly related to the number of input pulses applied.
Stepper Motor Parameters
- Rated voltage : 5VDC
- Number of Phase : 2
- Stride Angle : 5.625° /64
- Frequency : 100Hz
- DC resistance : 50Ω±7%(25℃)
- In-traction Torque >34.3mN.m(120Hz)
- Self-positioning Torque >34.3mN.m
- Friction torque : 600-1200 gf.cm
- Pull in torque : 300 gf.cm
- Insulated resistance >10MΩ(500V)
- Insulated electricity power :600VAC/1mA/1s