Modern cars may have up to 100 sensor for control and monitoring . With more and more features being added to cars like autonomous driving, airbag systems, smart car systems, sensors units continue to increase. With sensor units delivering important information like speed and etc, any miscommunication or loss of data could lead to fatal accidents. Thus, simple communication protocols like UART, I2C, SPI, are not suitable because they are not as reliable as CAN communication.
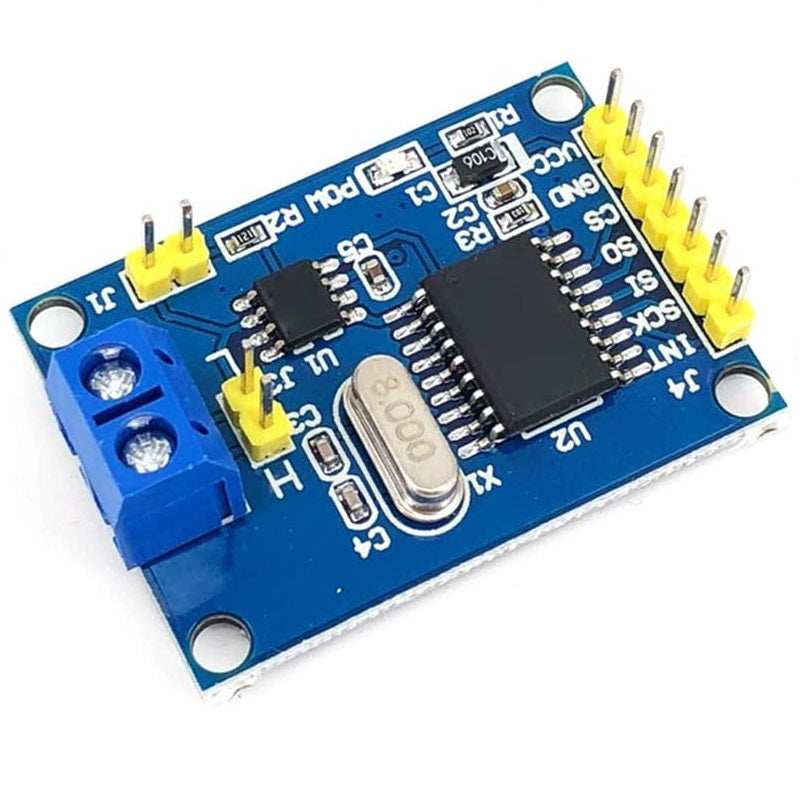
The MCP2515 CAN Bus interface module include both CAN Bus controller (MCP2515) and CAN Bus tranciever (TJA1050). Therefore you can use this module to connect any CAN device (like OBD II system in your car) to any microcontroller (like arduino, STM, TIVA C) without worring about if the microcontroller support the CAN Bus protocol or not.
Specifications
- Operating Voltage: 5V.
- Up to 1000 meter bus length
- Up to 1Mb/s bus speed
- SPI interface


Arduino MCP2515 CAN Bus Interface Tutorial.